研究 (Research)
最終更新日:
ヒトの巧のある作業動作のロボットへの直感的な教示 (Generating skillful robotic manipulation motion by human demonstration)
准教授 万 偉偉、教授 原田 研介(基礎工学研究科 システム創成専攻) WAN Weiwei , HARADA Kensuke(Graduate School of Engineering Science)
研究の概要
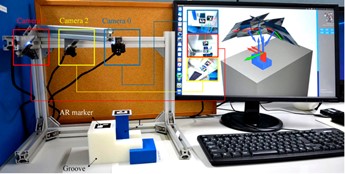
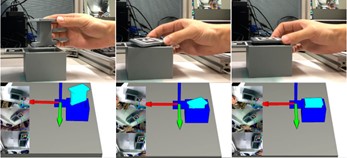
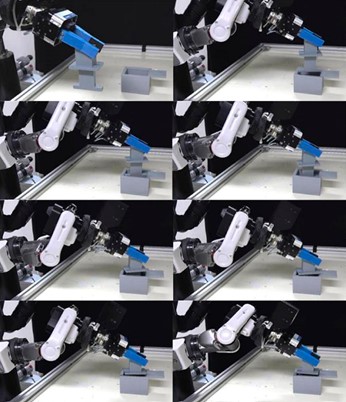
ヒトの生産作業には巧みのある動作が幅開く存在する。これらの動作のロボット化は難しく、従来の動作計画や模倣の手法でこのような動作と類似するロボットの動作を生成するのは困難である。これらの問題を解決するため、本研究では動作計画とヒトの教示軌跡の再利用を見分けて動作を生成する手法を開発した。流れとしては、まず、ビジョンで認識を利用して対象物の動作軌跡を追跡する。次に、教示軌跡の微分で動作のキーポーズあるいはキーポーズの行列を抽出する。そして、計画用と模倣用の軌跡を切り分ける。最後に、動作計画とヒトの教示軌跡の再利用をそれぞれ区切った軌跡に適用することによって巧のある動作の直感的な教示と生成を実装する。
研究の背景と結果
近年、中小企業にロボットを導入する事例が複数発表された。ロボットがヒトの代わりに生産作業を行い、効率かつコストの低い生産環境が整えられた。ただし、ロボットの導入は専門家による調整が必要で、ロボットに関する専門知識やノウハウを持たない中小企業の技術者に不向きである。そのため、中小企業へのロボットの導入を幅広い展開することが妨げられ、課題として残っている。この課題を解決するのはヒトの直感的な教示によってヒトの生産作業をロボット化することが望まれている。ヒトの生産作業に含む複雑なロボットの作業動作や作業の流れを直感的な手法によって容易に教示することはロボット工学における一つの究極的な問題であり、産業ロボットでは導入を容易にして生産性を上げる可能性を秘めている。現在、直感的な導入を実現する有望な手法はAI を併用した教示である。この手法では、深層学習でヒトの動作を抽出したり動作のプリミティブを模倣したり動作計画で無衝突の動作を確率的に生成したりする技術の開発が進んでいる一方、巧みのある複雑の動作への適用は非常に困難である。動作計画の視点から見ると、巧みのある複雑の動作は動作計画の狭い通路の問題となり、従来の手法を使って汎用的に解けるのは非常に困難である。本研究ではビジョンで認識したヒトの教示軌跡の微分を利用して巧のある動作のキーポーズあるいはキーポーズの行列を抽出することで、計画用と模倣用の軌跡を切り分ける。そして、動作計画とヒトの教示軌跡の再利用をそれぞれの区切った軌跡に適用することによって扉の付け替えや回転型コネクターの接続のような作業の直感的な教示を実装できた。また、強化学習を使って計画した軌跡の類似部品(サイズの変更や同じ幾何的な特徴を複数持つもの)への拡張も実現できた。詳しい情報は関連論文の1と2に参考されたい。
研究の意義と将来展望
現在流行っている協同ロボットの直接教示方式(ダイレクトティーチ)は直線動作に最適であり、細かい作業や巧のある動作などへの拡張は難しい。本研究で実装した内容は細かい作業や巧のある動作の難題を解決することができ、ダイレクトティーチと結合することでロボットの導入がさらに簡単になることを予想する。ロボットとヒトの同じように雇用されるRaaS 産業を推進することが期待される。
担当研究者
准教授 万 偉偉、教授 原田 研介(基礎工学研究科 システム創成専攻)
キーワード
ロボット動作計画/動作模倣/強化学習
応用分野
産業ロボット/協同ロボット/システムインテグレーション
参考URL
https://www.youtube.com/watch?v=xHLChh4Y2l0
https://www.youtube.com/watch?v=B75rBqCLYRQ