研究 (Research)
最終更新日:
自動離着桟技術に関する研究 (Research on autonomous berthing / docking)
教授 牧 敦生(工学研究科 地球総合工学専攻 船舶海洋工学部門) MAKI Atsuo(Graduate School of Engineering)
研究の概要
本研究では、船舶の自動での離着桟技術について検討を行っています。自動離着桟とは、車でいう自動での車庫入れ問題に対応しています。船は車のようにタイヤで地面に拘束されておらず、風により岸壁に押し付けられたり、逆に引き離されたりします。その結果、外乱下での離着桟は、船員の腕が試される場所でもあり、自動化の妨げとなってきました。この研究室では、そのような難しい大型船舶の離着桟を自動化するための研究を行っています。
研究の背景と結果
自動車や航空機などの他のビークルの分野における自動化の進展に呼応するように、船舶の分野においても自律運航船の実現に向けた研究が幅広く行われています。日本では、内航海運において、将来熟練した船員が高齢化などにより不足する可能性があるなど、幾つかのトリガーにより、自動着桟技術が注目されています。自動離着桟の技術的課題のうち、主要なものを列記すると以下となります。
イ)港内操船の航路計画
ロ)オンラインでの航路の再設計
ハ)低速操船時の操縦運動の動的モデリング
ニ)オンラインでの安定した制御技術
当研究グループではこれらのいずれの研究課題にも取り組んでいます。
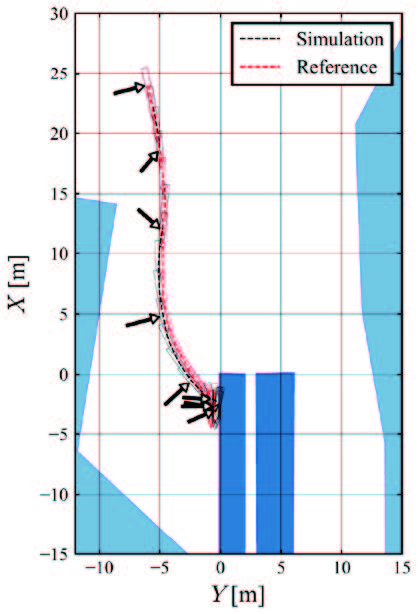
自動離着桟は岸壁の近傍で行われ、岸壁・桟橋との衝突は絶対に許されない反面、岸壁ぎりぎりまで船を自動誘導する必要があります。そのため、その離着桟の自動化はこれまで困難とされてきました。本研究室では、制御理論や最適化技術、また機械学習なども取り入れつつ、この問題に取り組んでいます。以下の左図は、自動離着桟をシミュレーション環境で行った結果です。また、大学構内の実験池において、右図のような模型船を用いて、自動離着桟の実験も行っています。このように、本研究室が保有する技術を用いることで、自動離着桟を安全かつ確実に行うことができるようになりつつあります。

研究の意義と将来展望
自動離着桟は岸壁の近傍で行われ、岸壁・桟橋との衝突は絶対に許されない反面、岸壁ぎりぎりまで船を自動誘導する必要があります。また、船のアクチュエータはさほど強いものではないため、先を読んだ制御を常に行う必要があります。よって、この問題は必然的に難易度が高くなり、離着桟の自動化を実用化レベルまで引き上げることは、これまで困難とされてきました。ここでは、制御理論や最適化技術、また機械学習なども取り入れつつ、この問題に取り組んでいます。船舶輸送は、その他の輸送手段に比べ、CO2排出量を低く抑えることができます。また、トラックの運転手が高齢化等により将来不足する可能性があることも指摘されています。よって、自動運航船の普及と共に、モーダルシフトを進めることで、より地球環境にやさしく、住みやすい社会を造り出すことができると考えられます。
担当研究者
教授 牧 敦生(工学研究科 地球総合工学専攻 船舶海洋工学部門)
キーワード
自律運航/自動離着桟/制御理論/大域的最適化/機械学習
応用分野
自動運航船/海中ロボット機器