研究 (Research)
最終更新日:
動物行動を理解するための機械学習技術 (Machine learning techniques for understanding animal behaviors)
教授 前川 卓也(高等共創研究院/情報科学研究科) MAEGAWA Takuya (Institute for Advanced Co-Creation Studies・Graduate School of Information Science and Technology)
研究の概要
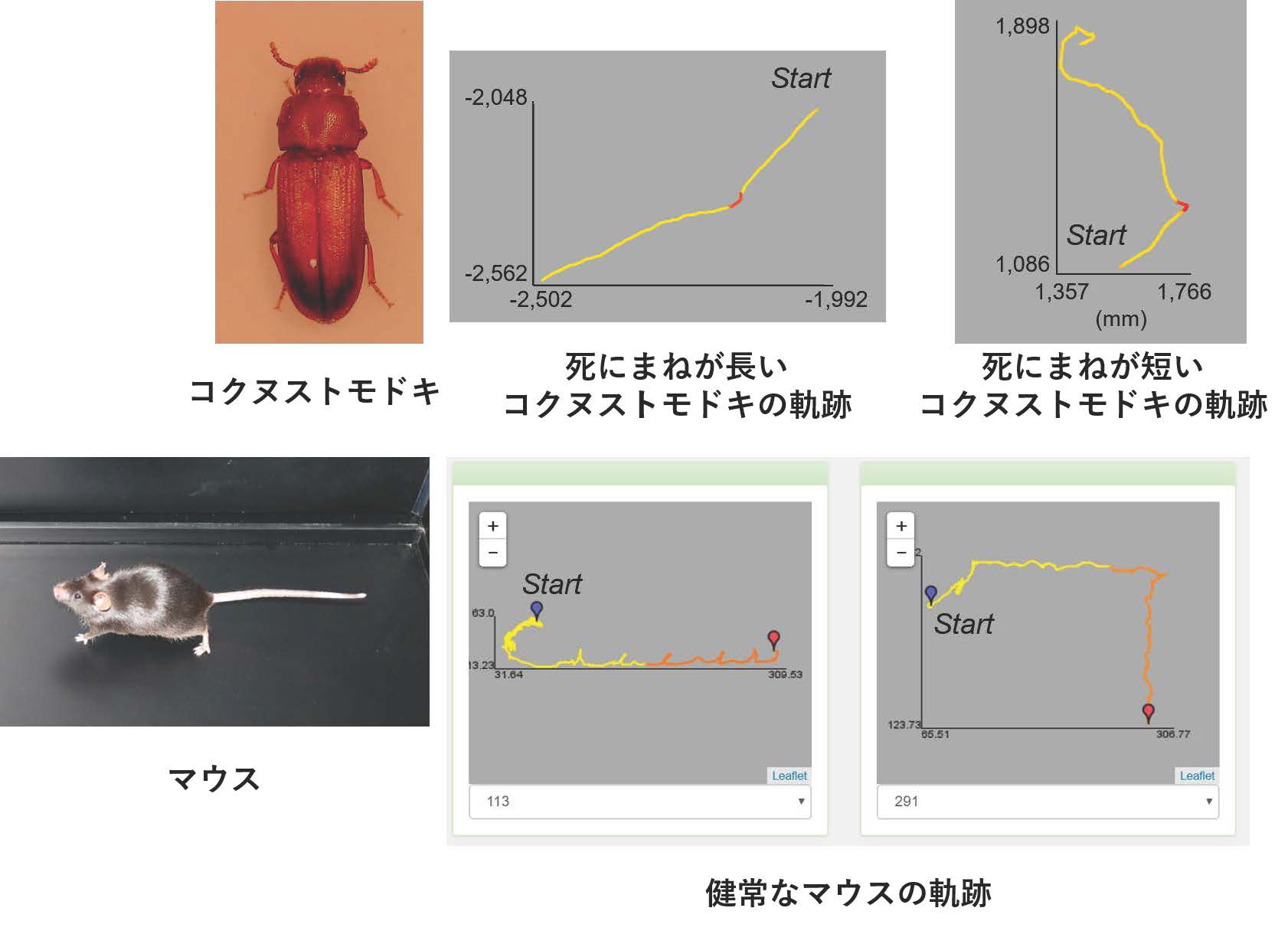
動物の行動は、外界からの入力とその内部処理の帰結であり、行動を計測・分析することで、動物の内部メカニズムの理解に繋がる。本研究では、動物の移動行動の計測・分析の最新手法を機械学習技術に基づき開発してきた。小動物に搭載するカメラを備えた従来のバイオロギングデバイスでは、バッテリ重量の制約上、常に映像を撮影し続けることは困難であり、生態学的に重要な発生頻度の低い行動を撮影することは困難だった。本研究グループでは、消費電力の小さいセンサで動物の行動を自動で認識する人工知能を搭載したバイオロギングデバイスを世界で初めて開発し、特定の行動(例:採餌の瞬間)が発生したときのみカメラによる録画を行うことができるようになった。また、ロギングデバイスによって得られた大量の動物移動行動データの分析を支援する深層学習手法を開発した。動物の移動軌跡の比較分析(例:病気と健常のマウス群の比較)を対象とし、比較群に特徴的な部分軌跡を自動的に検出、生物学者に提示する手法を開発した。分析手法により、パーキンソン病マウスが空間の探索を行いづらくなる特徴や、天敵に遭遇した際に“死にまね”をする昆虫の逃避戦略等が新たに発見できた。
研究の背景と結果
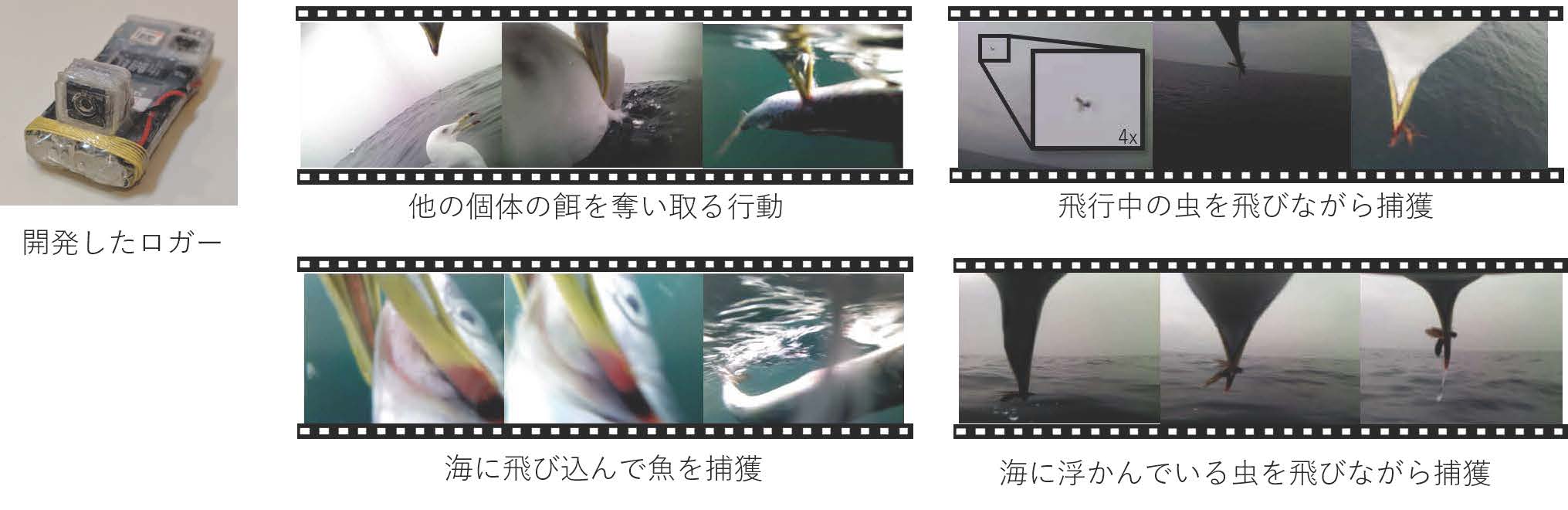
バイオロギングでは、動物に装着した小型センサロガーを用いて、研究者が目視観測できない世界を観測することができる。しかし、小型動物に装着するロガーは重量の制約があり、大型のバッテリを搭載できないため、発生頻度の低い研究者が興味のある行動をカメラ撮影することは困難だった。本研究では、ロガーに搭載された加速度センサやGPSなどのカメラに比べて低消費電力なセンサを用いて、ロガー上の人工知能により自動的に動物の行動を認識し、生態学者が興味のある行動が発生した時のみ、カメラで撮影を行う手法を考案した。バッテリの制約がある小型ロガーでは、搭載されるマイコンの性能も限られるため、メモリの少ないマイコン上で動作し、高い認識精度を達成する行動認識手法を開発した。青森県蕪島に生息するウミネコを用いた実験では、ランダムにカメラを起動する手法と比べて、15倍の効率で対象とする採餌イベントの撮影に成功した。提案手法により、ウミネコの採餌行動に関して初めて観測される映像等を撮影することができた(図1)。
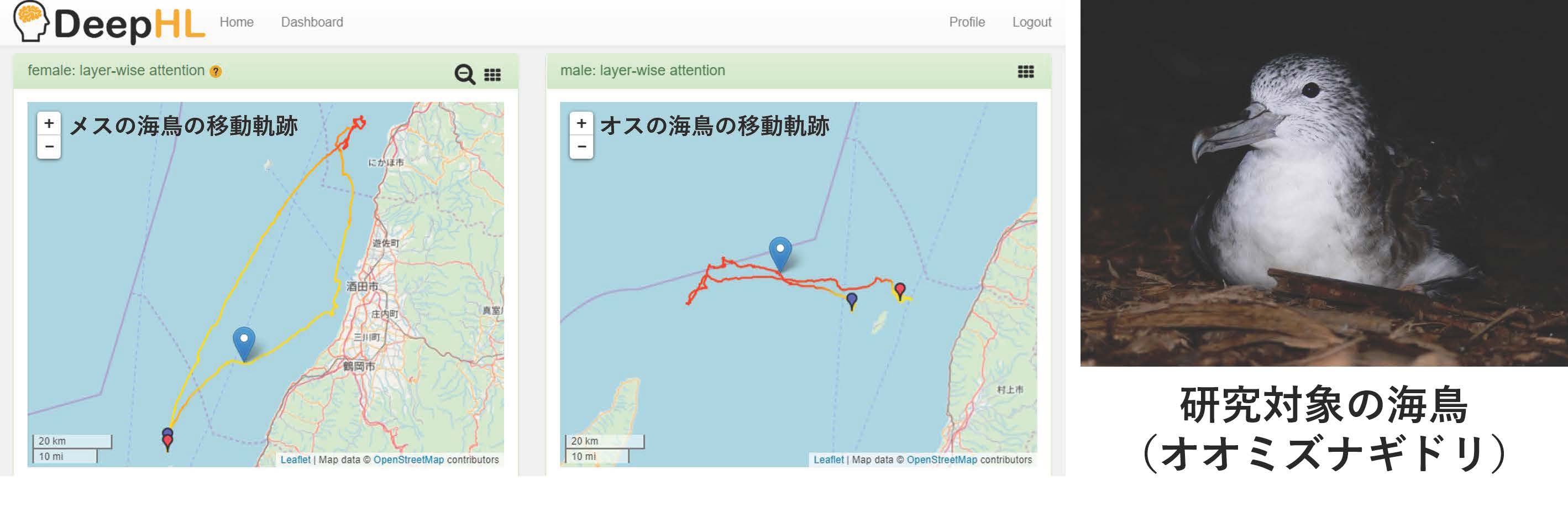
GPSなどの機器により計測された動物の移動行動データは、例えば病気の動物と健常の動物の比較に用いることで、病気が動物の行動にどのような影響を及ぼすかを評価したり、オスとメス動物の比較によりそれらの生存戦略の違いを明らかにしたりするために生物学者によって分析される。しかし、これまでの多くの分析手段は、生物学者の手作業による分析に依存しており、大量のデータを手作業で分析する労力は非常に大きいものだった。そこで本研究では、動物行動軌跡の比較分析において、比較する群に特徴的な部分軌跡を自動的に検出して、生物学者に提示する手法を考案した。提案手法では、アテンションと呼ばれる機構をニューラルネットワークに組み込むことで、2群の顕著な部分軌跡を検出し、生物学者に提示することで分析を支援する(図2)。本手法は、海鳥、クマ、線虫、マウス、コオロギ、甲虫の行動軌跡データに適用され、それぞれの動物の新しい生態を発見に繋がった。
研究の意義と将来展望
これらの計測・分析手法により、人間や動物に共通する病気の理解や気候変動下での害獣との共生を加速させる可能性がある。
担当研究者
教授 前川 卓也(高等共創研究院/情報科学研究科)
※本学ResOUのホームページ「究みのStoryZ」に、インタビュー記事が掲載されています。是非ご覧ください。
https://resou.osaka-u.ac.jp/ja/story/2018/v8a8ix/
キーワード
バイオロギング/機械学習/行動認識
応用分野
スマートデバイス/行動分析