研究 (Research)
最終更新日:
感触を損なわずに弾性柔軟素材を触覚センサにする技術 (Technology for using elastic flexible materials as tactile sensors without loss of feel)
講師 石原 尚(工学研究科 機械工学専攻) ISHIHARA Hisashi(Graduate School of Engineering)
研究の概要
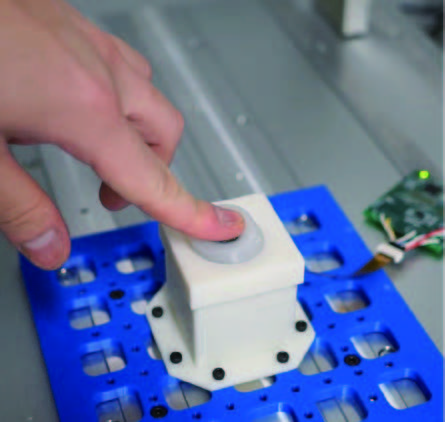
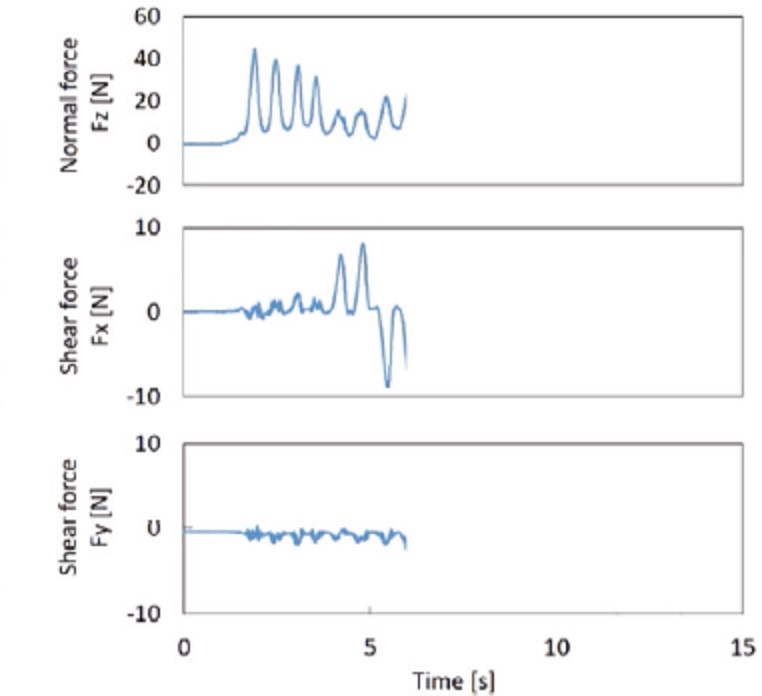
近年、IoT化の進展とともに、人に直接触れるセンシングデバイスの必要性が増しているが、本技術は、ゴムやゲル等の弾性素材の柔らかさを保ったまま、力の向きと大きさを測るセンサを提供するものである。柔軟素材に鉄粉などの強磁性微粒子を局所混合し、その下にコイル配線基板を敷くだけの単純な構造であり、素材の感触の良さをほとんど損なわず、正確なセンシングが可能である。また、変形する部分に壊れやすい電気配線や素子を含まないため、柔軟素材を大きく変形させるような力や衝撃が加わった場合でも、その素材が破壊されない限りセンサ性能が維持され、もし柔軟素材が劣化した場合でも、基板から剥がして貼り替えるだけで性能が回復する特徴を持つ。
社会実装に向けた将来展望
本技術は、枕やマットレスなどの寝具、車のハンドルやカメラグリップ、マッサージチェアや腹筋訓練ベルトなど、肌との接触感触が重要な製品への触覚センサ搭載に最適である。また、愛玩用ロボットや人にやさしい作業ロボット、食品を取り扱うロボットや、手術ロボットにも応用可能である。
担当研究者
講師 石原 尚(工学研究科 機械工学専攻)
キーワード
柔軟材料/触覚センサ/力覚センサ/感触/安全/耐久
参考URL
https://nararobocon.sakura.ne.jp/kawasetsu_hp/category/研究テーマ/