研究 (Research)
最終更新日:
省ティーチングでソフトタッチ制御が可能なロボットシステムの事業化 (Commercialisation of robot systems with reduced teaching and soft-touch control)
助教 小山 佳祐(基礎工学研究科 システム創成専攻) KOYAMA Keisuke(Graduate School of Engineering Science)
研究の概要
人間が机上のボールペンを掴む際には、①机面に沿って指先をスライドさせ、②ペン側面に沿って指腹の方向を瞬時に調整する。このソフトタッチでの動作を工学的に如何に高速、安全、高耐久、省ティーチングで実現するかが製造業におけるロボティクスの本質的な問題である。
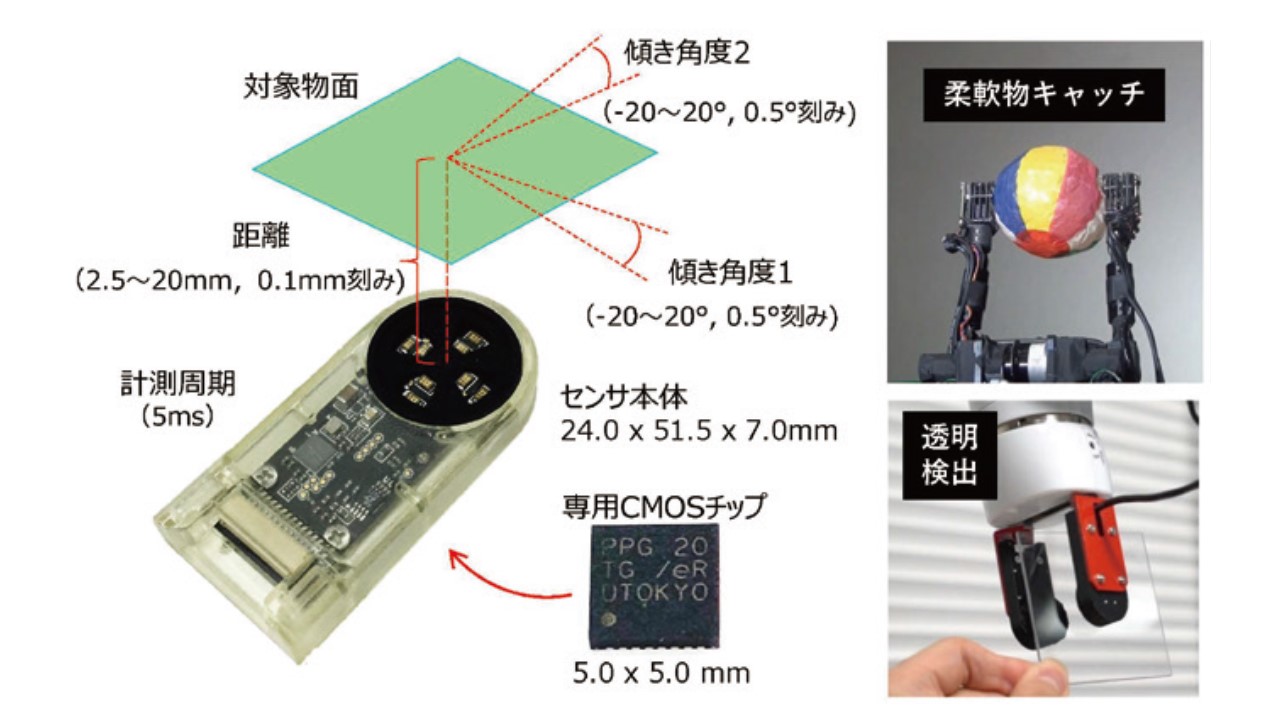
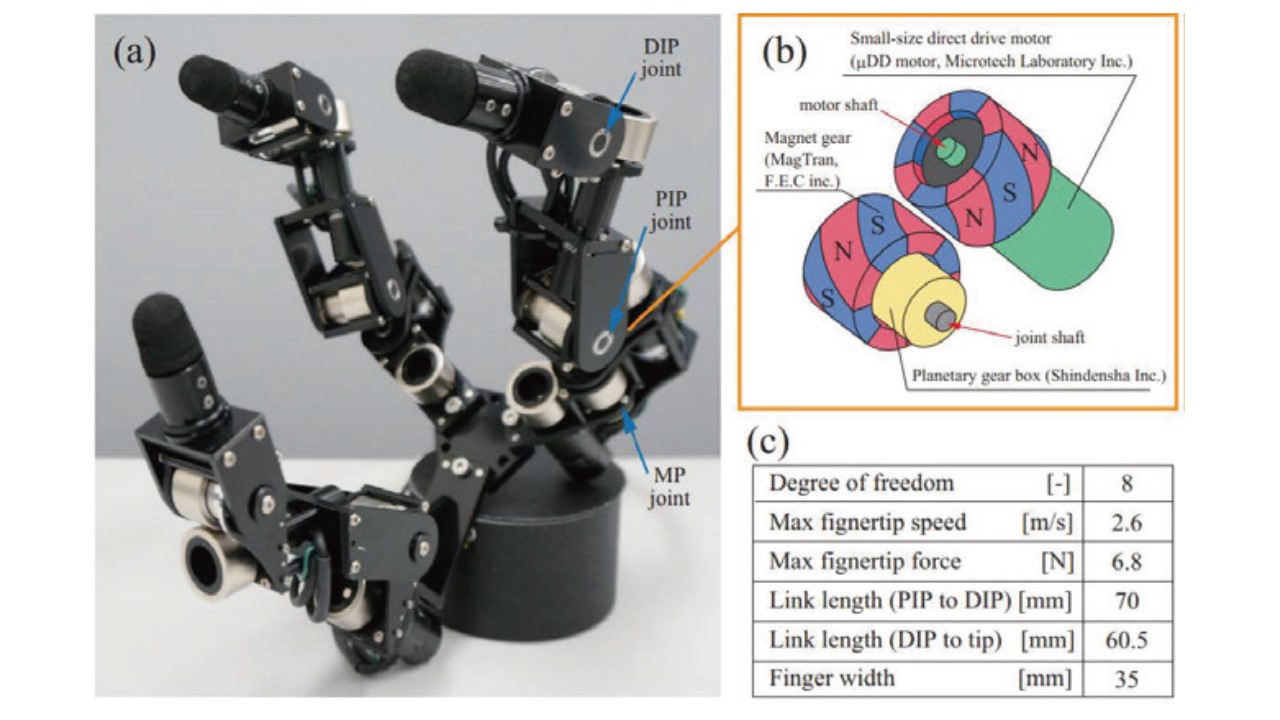
本プロジェクトでは、①と②を可能とするソフトタッチ制御により、既存技術では自動化が困難であった人手作業の自動化を実現し、新たなマーケット開拓を目指す。ソフトタッチ制御を実現するためのキーとなる技術シーズは、①高速で繊細な力制御を実現する超低摩擦アクチュエータと、②指腹の向きを接触力ゼロで瞬時に調整可能とする超近接覚センサの二つである。二つの技術シーズの組み合わせにより、事前のロボットの教示作業を削減しつつ、既存のロボット技術では実現困難とされてきた食品/物流倉庫内の人手作業の自動化を実現する。
社会実装に向けた将来展望
精密部品の組立作業や、柔軟食品を扱う作業のほか、試験管・シャーレの精密な操作といった難自動化作業をターゲットとし、まずは超近接覚センサを備えた協働ロボットシステムを開発する。そして、超低摩擦アクチュエータに関しては、制御システムの汎用化・低コスト化を進めることで、顧客要求・環境にマッチしたプロトタイプを開発する。
担当研究者
助教 小山 佳祐(基礎工学研究科 システム創成専攻)
キーワード
近接覚センサ/低摩擦アクチュエータ/ロボットハンド