研究 (Research)
最終更新日:
筋肉・受容器・神経デバイスの超分散化で切り拓く無脳ロボティクス (Brainless robotics pioneered by hyperdistribution of muscles, receptors and neural devices)
助教 増田 容一(工学研究科) MASUDA Yoichi(Graduate School of Engineering)
研究の概要
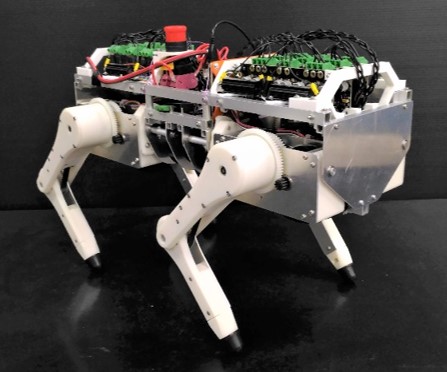
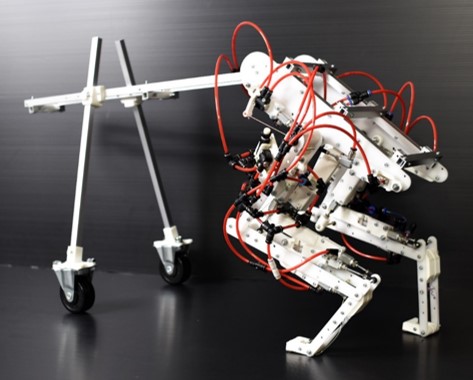
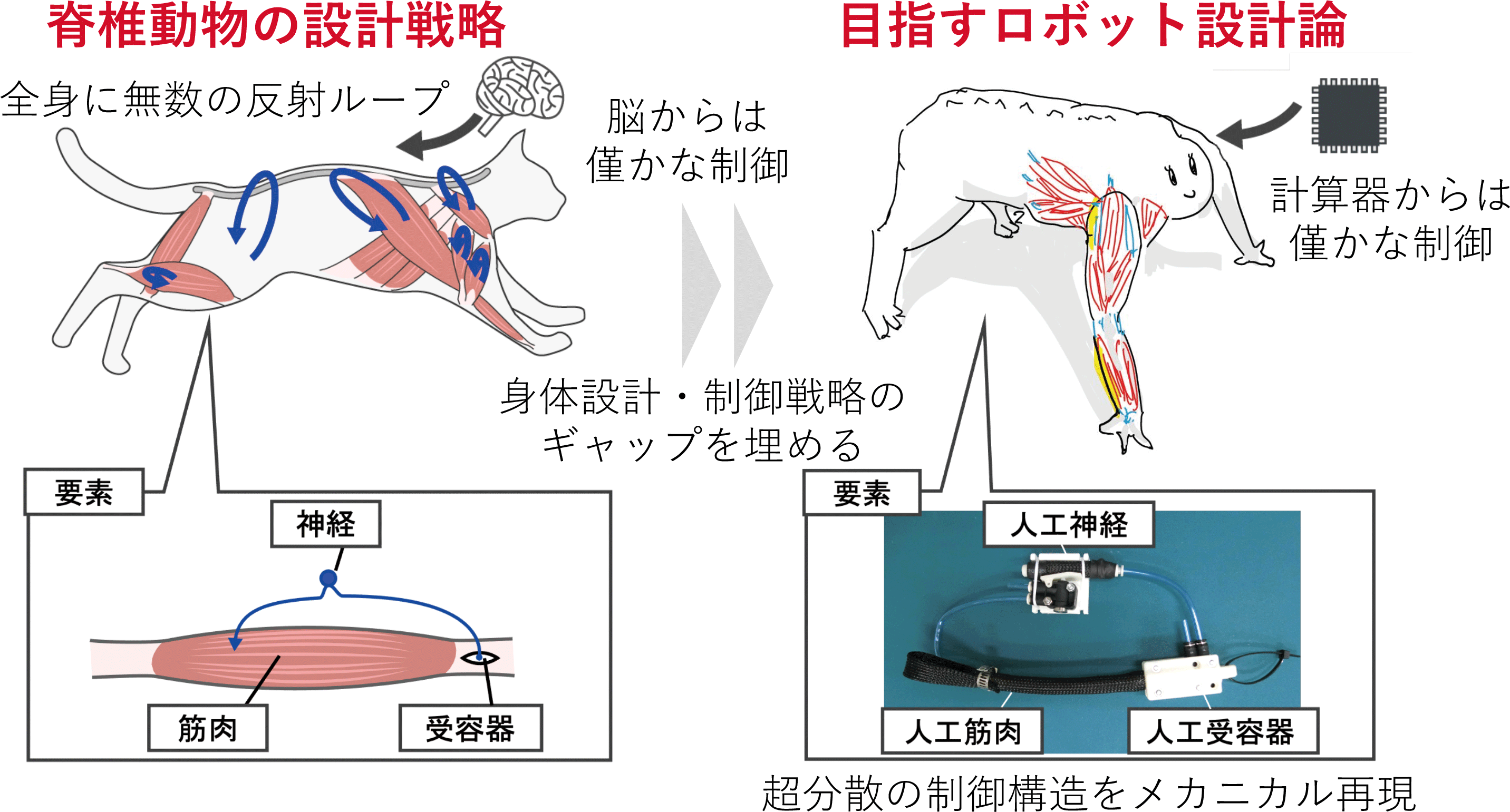
動物にあって現在のロボットにないもの、それは予測不能な環境変化に瞬時に対応する能力です。動物は、大脳の計算能力がなくとも筋肉と運動神経、身体ダイナミクスの相互作用のみで瞬時の適応を実現できます。これに対し現在のロボットは、制御の複雑化に伴う計算速度の壁という呪縛にとらわれ、環境変化に即応できないという問題を抱えています。今後訪れるロボット大進出時代のためには、頭脳中心型の制御戦略を脱する必要があります。我々は、機械式の筋肉・受容器・神経デバイスを全身に埋め込み、上位脳のわずかな調整により統御する新ロボット学を目指しています。これまで、ごくシンプルな制御原理から、環境適応的な運動が発現する現象を世界に先駆けて発見しました(図1)。現在は解剖学や神経生理学など、動物の真の構造を理解して再現する研究を進めることで、動物の能力に比肩するロボット実現を探求しています(図2)。
研究の先に見据えるビジョン
生工融合で目指すロボットの真の動物化
信頼に基づく機械学習と人間の共創本研究では、性能保証を諦めることなく、機械学習の性能の測り方とフィードバック形成の刷新に取り組んでいます。この新しい技術産業機械から受け継がれたロボットの伝統的な設計法は、複雑な実環境を前にして限界を迎えつつあります。この研究は、動物に備わる「計算なき運動知能」をありのままに再現するため、ロボットの設計・制御戦略を刷新します。動物-ロボット間の構造的なギャップを埋める「生工」融合の新たな領域を創出することで、「ロボットの真なる動物化」を目指します。
担当研究者
助教 増田 容一(工学研究科)
※本学ResOUのホームページ「究みのStoryZ」に、インタビュー記事が掲載されています。是非ご覧ください。
https://resou.osaka-u.ac.jp/ja/story/2023/OURG-01-05/
キーワード
無脳ロボティクス/生工融合
応用分野
巧みに・効率的に動く自律移動ロボット/生体理解に基づくリハビリや身体拡張