研究 (Research)
最終更新日:
生体の柔らかさ特性のセンシングと情報処理技術 (Sensing and information processing technology for biological softness characteristics)
准教授 小林 洋(基礎工学研究科) KOBAYASHI You(Graduate School of Engineering Science)
研究の概要
触診のように、筋肉や臓器等の身体部位の柔らかさの情報は人体の健康を判断するために重要であり、その客観的な指標化が求められています。しかし、生体軟組織は流動性等を含む特殊な機械的特性(生体レオロジー特性)を有するため、それを考慮した数値化が必要になります。我々は生体レオロジー特性をセンシングする装置とその情報処理技術およびモデル化手法を開発し、その正確かつ安全な生体計測による医療支援システムの実現を目指しています。
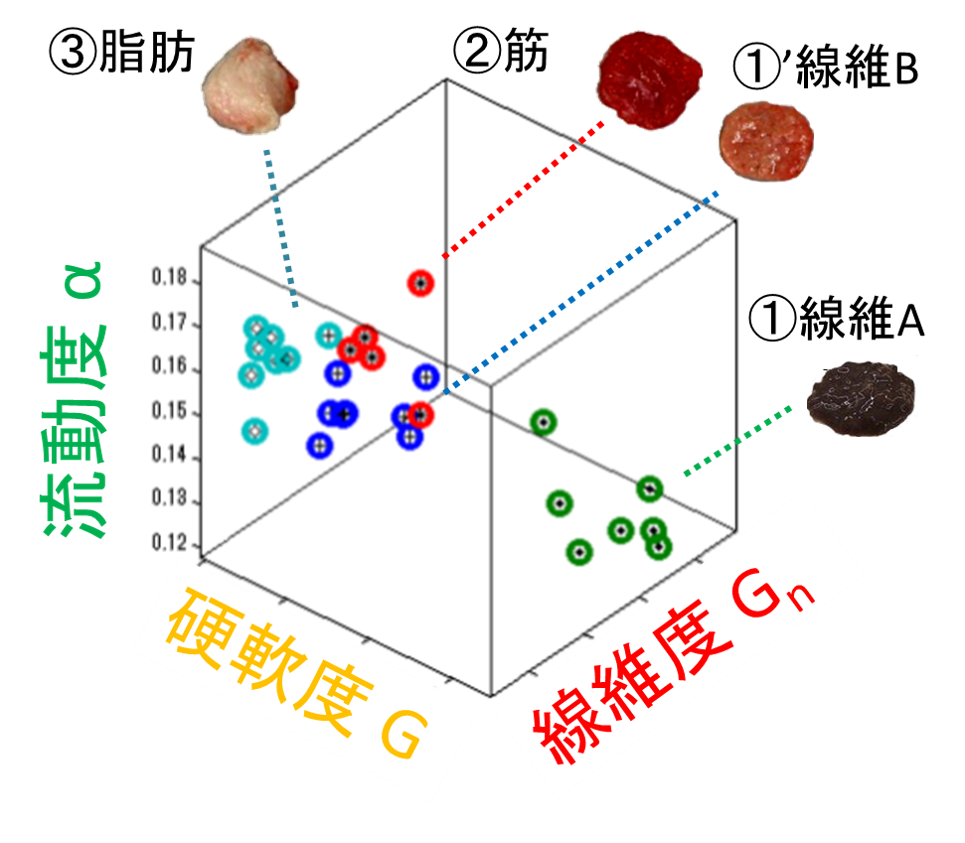
これまでの研究で、ロボット技術を応用した低コスト・小型・簡便・安全なセンシングシステムを開発しました(図1)。人体表面の測定箇所にデバイスを押し当てると、その押し込み部が自動で動き、力センサにより変位と反力の情報を取得します。また、生体レオロジー特性指標を入力した機械学習手法により、実測データから組織を分類・判別できるシステムを構築しました(図2)。

研究の先に見据えるビジョン
生体レオロジー特性の理解に基づくヘルスケア
生体レオロジー特性をはじめとした機械的・運動学的・生理学的な指標に基づいた生体データの計測と解析により、個人のテーラーメードな健康支援が可能になります。その一つとして、現在、触診やエラストグラフィ(組織の硬さの可視化法)が対象としている手技の精度向上や測定可能範囲の拡大を目指しています。これにより、筋肉や臓器の状態診断による予防医学の発展、さらには医療費削減や健康寿命の増進などの社会問題の解決につなげていきます。これらのシステム開発とその社会実装の過程において「豊富な経験を有する専門家」と「定量化が得意な支援システム」の知能と能力が調和した質の高いヘルスケアの実現を目指しています。
担当研究者
准教授 小林 洋(基礎工学研究科)
キーワード
生体レオロジー特性/生体軟組織/センシングデバイス/機械学習/変形シミュレーション
応用分野
生体組織の状態や質の計測/医用ロボット/生活支援システム/医療福祉