研究 (Research)
最終更新日:
柔軟物操作支援のための変形モデリングと作業計画
准教授 若松 栄史(工学研究科 マテリアル生産科学専攻) WAKAMATSU Hidefumi (Graduate School of Engineering)
研究内容
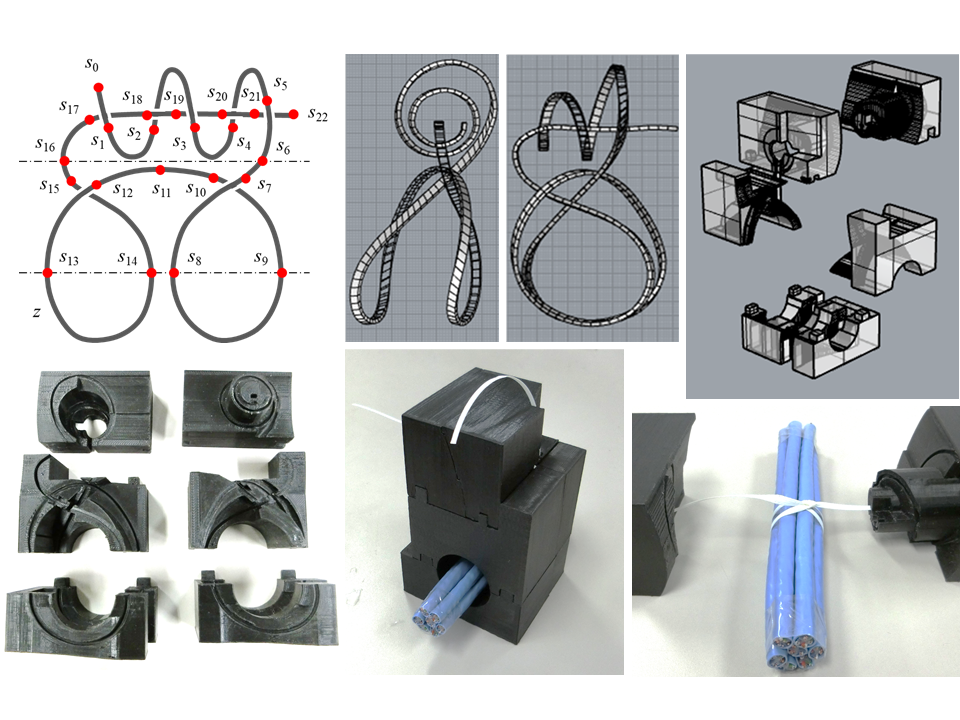
機械システム化の進んでいる生産現場においても、電線や布地等の柔軟物操作の自動化にはまだ課題が残されています。作業者を機械システムで代替するというと、人間型ロボットを想像しがちですが、それだと性能過剰である可能性もあります。我々は、柔軟対象物をモデル化すると共に、操作を定性的に分類し、必要最小限の機構を設計する手法を提案しています。例えば、電線群を束ねて結ぶような操作を実現できる工具等を設計し、柔軟物操作の効率化を目指します。
担当研究者
准教授 若松 栄史(工学研究科 マテリアル生産科学専攻)
キーワード
柔軟物操作/変形シミュレーション/作業計画/製品設計
応用分野
ファクトリーオートメーション(FA)分野/ロボット工学分野/製品設計分野
論文・解説等
[1] 宗田あずみ, 若松栄史ほか, 日本ロボット学会誌, Vol.37, No.1, (2019), pp.73-80.
[2] H. Wakamatsu et al., Robotics: Science and Systems III, The MIT Press, (2008), pp.89-96.
[3] 若松栄史ほか, 日本ロボット学会誌, Vol.24, No.4, (2006), pp.523-532.