研究 (Research)
最終更新日:
「動くもの」をつくる・あやつる・解き明かす非線形制御とロボティクス
教授 石川 将人(工学研究科 機械工学専攻/コマツみらい建機協働研究所) ISHIKAWA Masato (Graduate School of Engineering/Komatsu MIRAI Construction Equipment Cooperative Research Center )
研究内容
・制御工学とロボティクスが専門。特に非線形システムの制御と、移動ロボットへの応用に興味をもち、数理的なアプローチを得意とする。
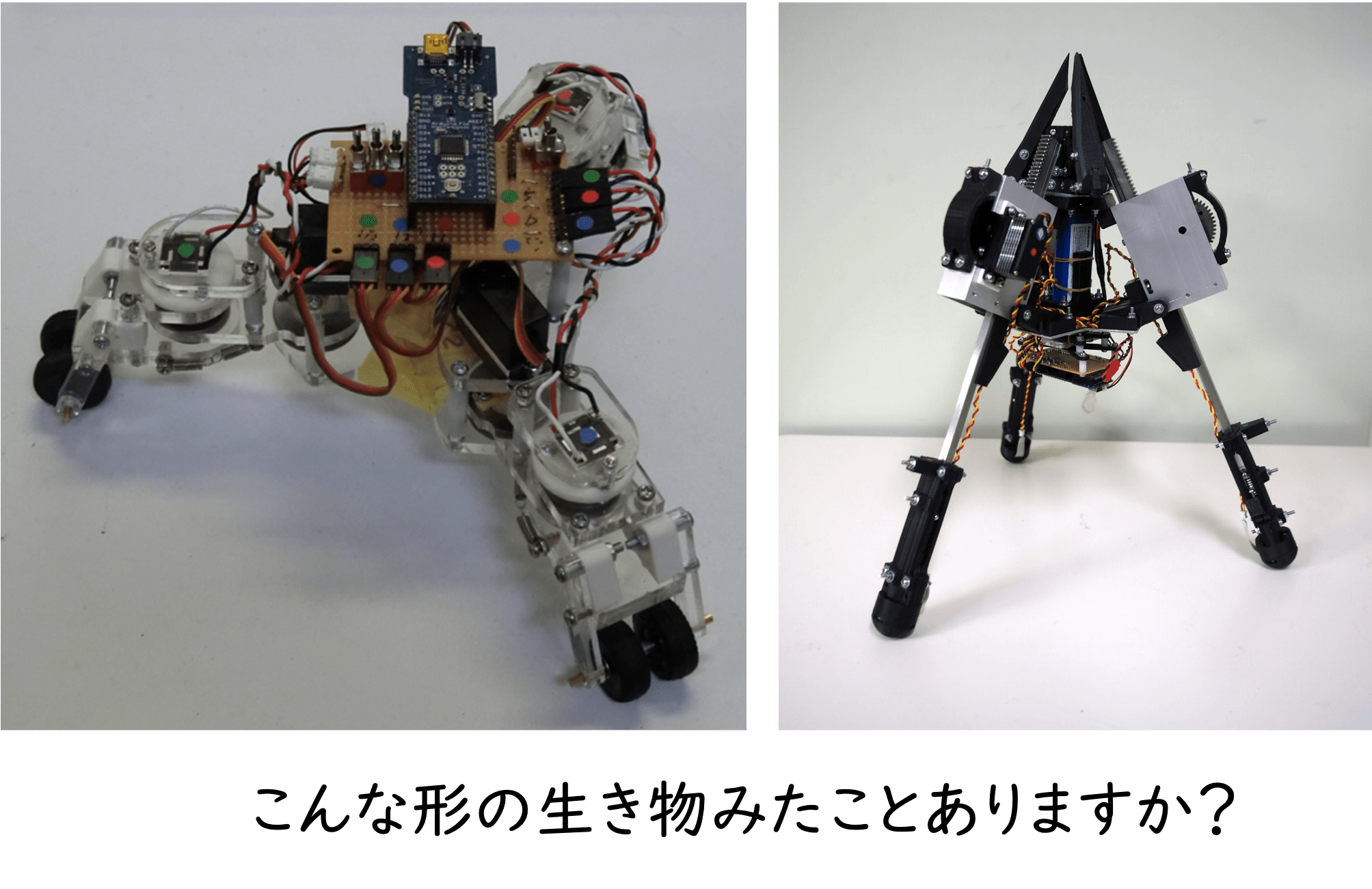
・生物に学ばないロボティクス:実在生物の先入観に頼らず、数理的な見地から新たな身体のかたちを探求、空想生物のロコモーション。
・建設機械、油圧作業機械のモデリングと制御。複雑きわまりない土砂の挙動をあやつるために、データサイエンスと制御理論を活用。
・マルチエージェント系における知的相互推論、コミュニケーションの創発、言語の獲得過程。
担当研究者
教授 石川 将人(工学研究科 機械工学専攻/コマツみらい建機協働研究所)
キーワード
制御工学/空想生物/建設機械
応用分野
移動ロボット/メカトロニクス/建設機械の自動化
論文・解説等
[1] 石川:掘るとはなにか, 建設機械, 56(10), pp.26–31 (2020)
[2] 石川:砂に埋もれたモデルを探して, 計測と制御, 58(3), pp.161–165 (2019)
[3] 石川:生物に学ばない移動メカニズム, システム/制御/情報, pp.524–529 (2009)