研究 (Research)
最終更新日:
適応的に動くロボット実現のための機構駆動制御の連関とその応用
准教授 杉本 靖博(工学研究科 機械工学専攻) SUGIMOTO Yasuhiro (Graduate School of Engineering)
研究内容
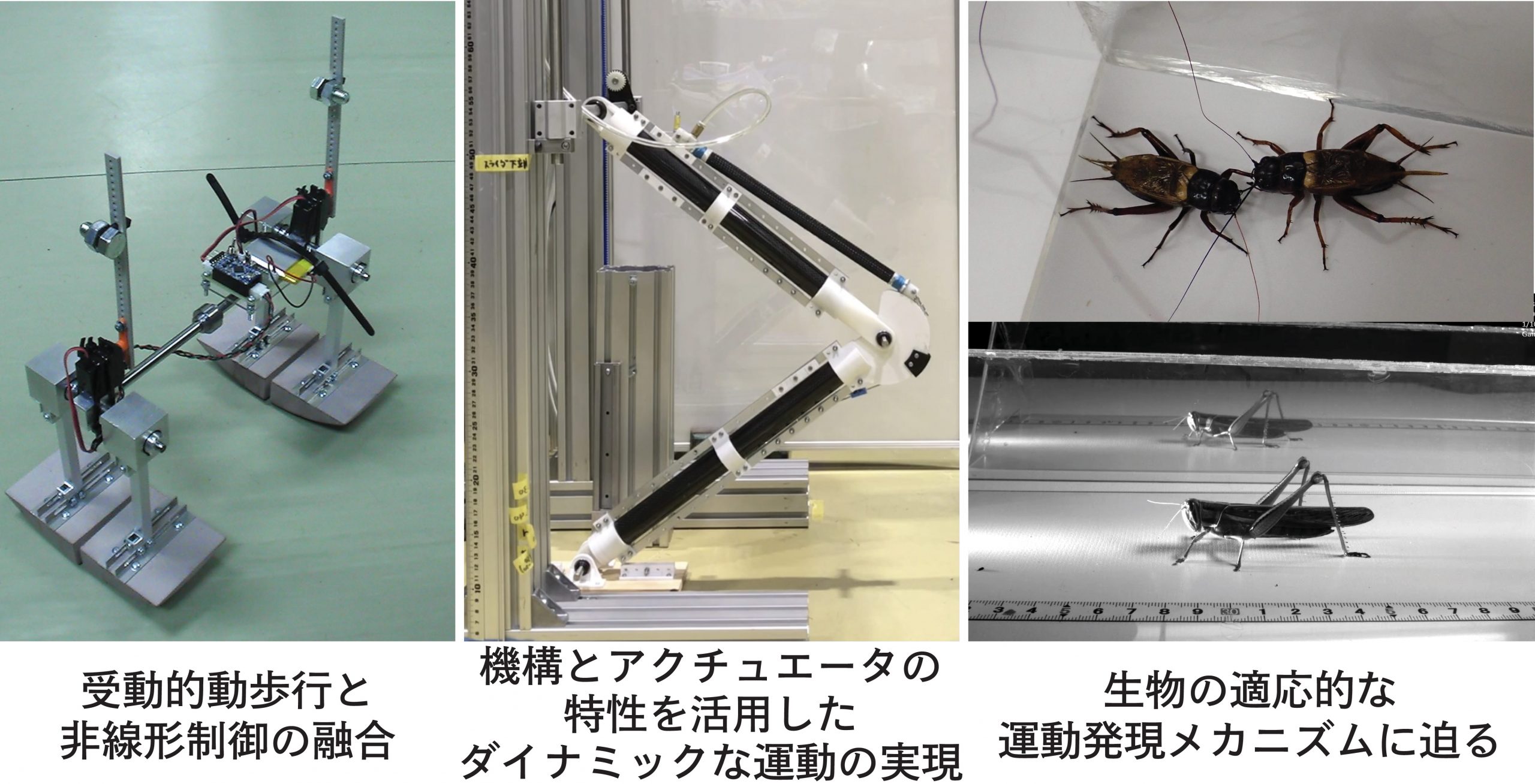
生物のようにダイナミックで適応的なロボットの運動を実現するためには、ロボットの機構やアクチュエータ、制御系が持つ特性を巧みに組み合わせることが必要不可欠と考えられます。そこで、それらを如何に連関させていくべきかについて、解剖学や神経生理学の知見を活用しつつ、理論的解析を行っています。一方で、それまでの研究で得られた知見やロボット工学、制御工学などを応用して、生物が見せる適応的運動の発現メカニズム理解に迫るという研究も並行して行っています。
担当研究者
准教授 杉本 靖博(工学研究科 機械工学専攻)
キーワード
ロボット/アクチュエータ/生物/異分野融合
重点分野
ロボティクス
応用分野
ロボット工学/制御工学
論文・解説等
[1] T. Goto, Y. Sugimoto, et al., Journal of Robotics and Mechatronics, 33(2):410, 2021
[2] Y. Sugimoto et al., Advanced Robotics, 34(2):1110, 2020
[3] Y. Sugimoto et al., Nonlinear Theory and Its Applications, E6-N(4):475, 2015