研究 (Research)
最終更新日:
マニピュレーションの原理原則を探求し、機械システムとして実装
教授 東森 充(工学研究科 機械工学専攻) HIGASHIMORI Mitsuru (Graduate School of Engineering)
研究内容
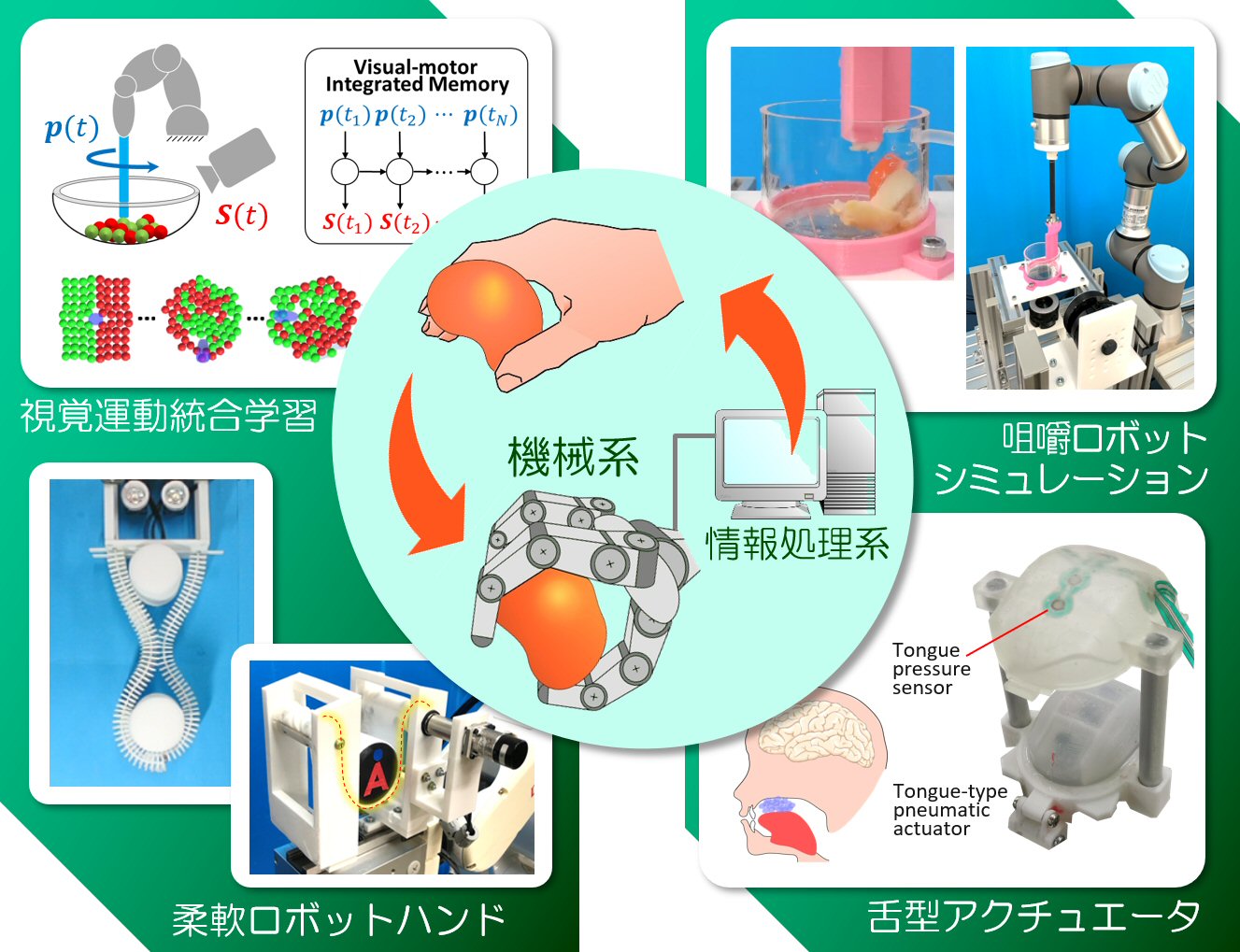
マニピュレーション(物体の操り)を中心としたロボティクス・メカトロニクスに関する研究に取り組み、基礎理論から数値シミュレーション、実機実験に至るまでの独創的な学術体系の構築を目指しています。さらには、医歯学や食品科学と融合し、マニピュレーションならびにセンシングに関する新奇課題の創出、新奇システムの設計・実装論の構築に取り組んでいます。具体的には、「柔軟メカニズムによる劣駆動型操作」「機械学習を用いた不定形・不均一物体の操作」「食品操作・評価技術への応用」などの研究を推進しています。
担当研究者
教授 東森 充(工学研究科 機械工学専攻)
キーワード
ロボティクス・メカトロニクス/ロボットマニピュレーション/ フードエンジニアリング
重点分野
AI・データ/情報・通信/計測分析技術/医工連携/ヘルスケア/ロボティクス
応用分野
ファクトリーオートメーション(FA)/食品開発分野/医療・リハビリテーション分野
論文・解説等
[1] M. Higashimori et al., IEEE Trans. Robot., 35–3, pp. 602–617 (2019)
[2] 東森ら, 日本ロボット学会誌, 39–6, pp. 553-554 (2021)
[3] 東森ら, 日本食品科学工学会誌, 68–2, pp.55–64 (2021)