研究 (Research)
最終更新日:
身の回りで巧みに動くロボット基盤技術の構築とその展開 (Construction and Deployment of Foundational Technologies for Skillfully Moving Robots in Everyday Environments)
助教 増田 容一(工学研究科附属フューチャーイノベーションセンター/機械工学専攻) MASUDA Yoichi (Graduate School of Engineering)
研究内容
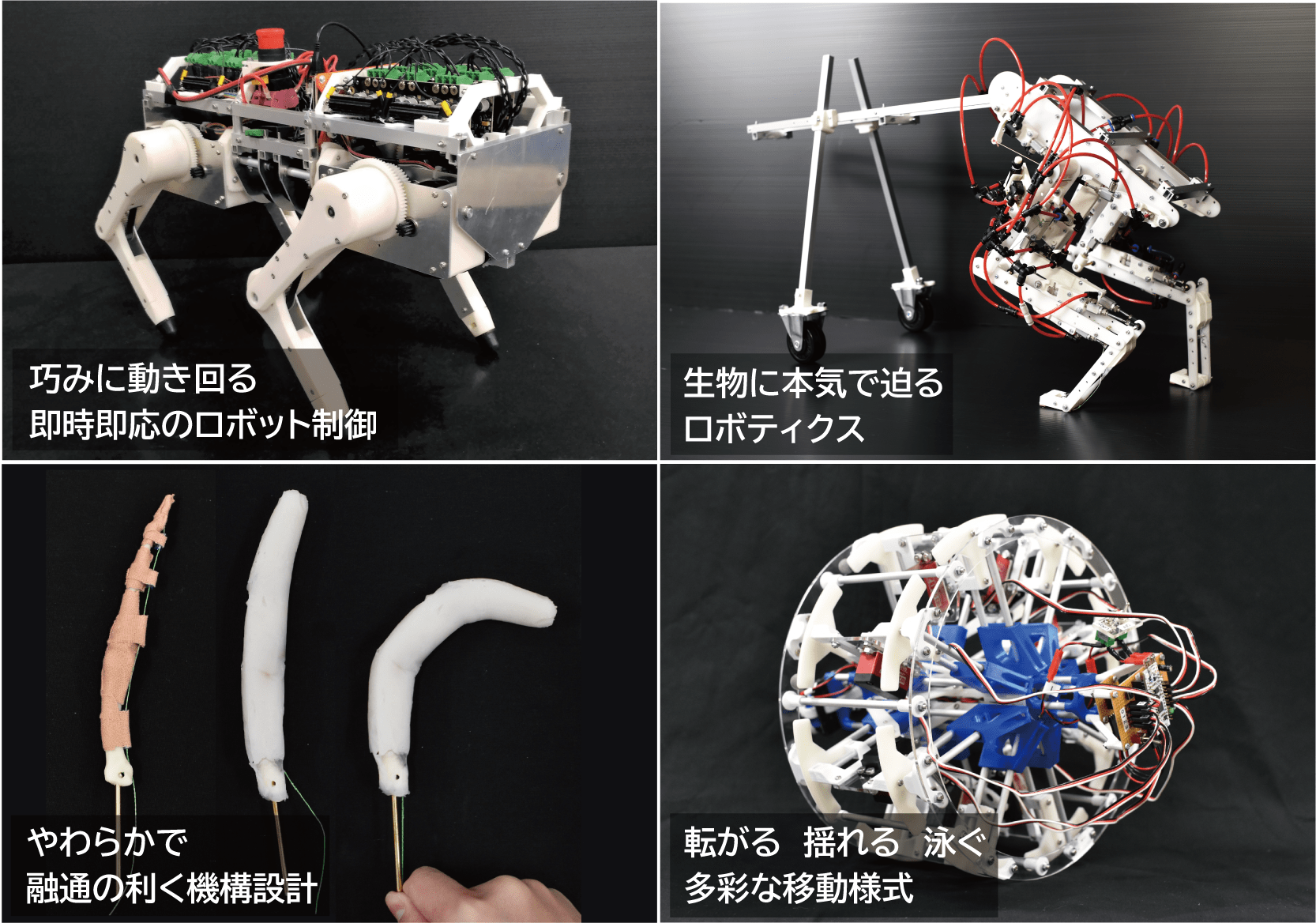
「歩く」「転がる」「揺れる」「泳ぐ」—。我々は、来たるべきロボット大進出時代に向けて、複雑な環境で巧みに動き回るロボット基盤技術の構築に取り組んでいます。特に、ロボットの全身をいかにして操るかという運動制御や、従来の制御や情報処理を代替する身体機構の研究に挑んでいます。近年ではロボティクスのみならず、神経生理学や解剖学に基づく革新的なロボット技術の開発や、反対にロボット技術を応用して動物の運動メカニズムを理解する研究など、異分野横断的な研究を進めています。
担当研究者
助教 増田 容一(工学研究科附属フューチャーイノベーションセンター/機械工学専攻)
キーワード
ロボット/知能/AI/生物/異分野融合
重点分野
AI・データ/ロボティクス/スマートシティ/スマートモビリティ
応用分野
ロボット工学/制御工学/省力化
論文・解説等
[1] 増田, 無脳歩行現象:「弱い」モータや筋肉から発現する運動パターン, 日本ロボット学会誌, 2020.
[2] Y. Masuda, K. Miyashita, K. Yamagishi, M. Ishikawa, and K. Hosoda, IROS, 2020.
[3] T. Tanikawa, Y. Masuda, and M. Ishikawa, Frontiers in Neurorobotics, 2021.