研究 (Research)
最終更新日:
人間の行動から学習するロボット知能 (Robot intelligence that learns from human behaviour)
髙野 渉(数理・データ科学教育研究センター) TAKANO Takano(Center for Mathematical Modeling and Data Science)
取組要旨
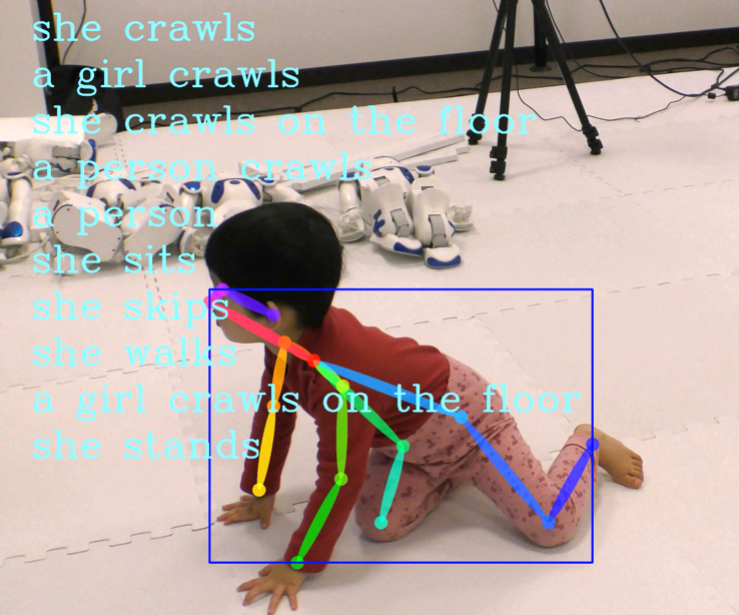
ロボットを日常生活に取り入れるには、ロボットが言語を学ぶ、例えば、観察した人間の運動や自身が生成する運動とそれを説明する文章との対応を学習することが有効です。我々は自然言語処理の手法と運動を記号化する統計モデルが同じであることに着目し、その記号化された運動パターンと文章とを結びつける統計モデルを開発しました。それにより、ロボットは人間の運動を見て文章を生成でき、また、与えられた文章から運動を生成できるようになります。このような技術を発展させ、体操のようなスポーツにおける身体運動の計測データからヒューマノイドロボットが運動を学習したり、その人の体操を自動採点したりする手法を開発しています。また、様々な人の行動の計測データから、それを記述する文章を生成する技術を提案しました。これは介護日誌を自動生成するシステムや自動緊急通報システムの基盤となります。
研究成果・インパクト
我々の研究のゴールは、世界中の人間のあらゆる行動を理解して言語化することで、我々の日常生活でロボットが活躍することです。行動パターンの構造化により将来の行動を予測できるようになります。それにより、ロボットが人の現在の動きからその先の行動を予測し、さらにその状況で何をすべきか考えて行動できるようになることが期待されます。
担当研究者
髙野 渉(数理・データ科学教育研究センター)
キーワード
運動と言語、ヒューマノイドロボット、統計モデル、運動認識と生成
応用分野
スポーツ解析、高齢者の運動の質の評価、自動車運転データ解析、知能ロボット