研究 (Research)
最終更新日:
循環型モノづくりを目指した知能ロボットによる慎重かつ迅速な家電分解実現の試み(Efforts to Realize Careful and Rapid Home Appliance Disassembly by Intelligent Robots for Circular Manufacturing)
助教 清川 拓哉(基礎工学研究科) Takuya Kiyokawa (Graduate School of Engineering Science)
研究の概要
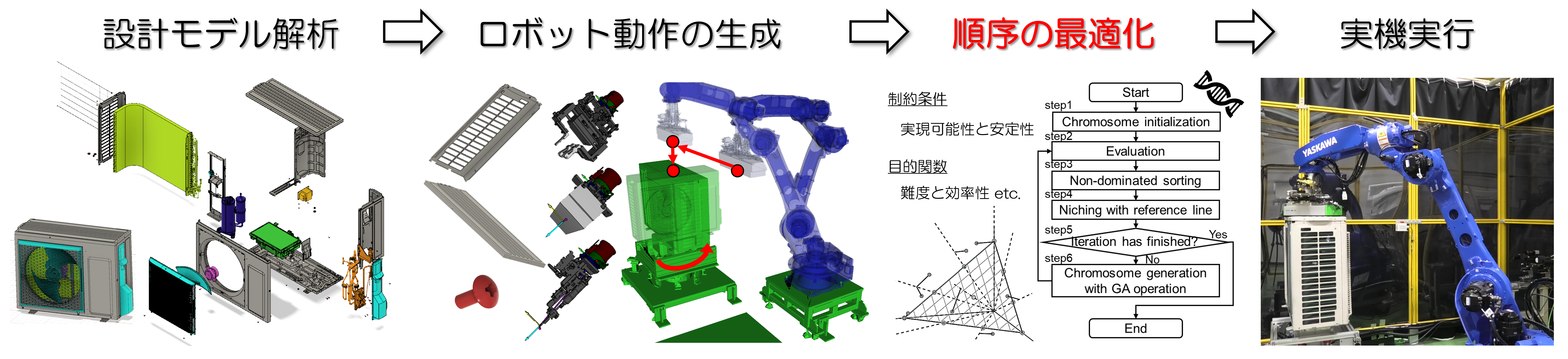
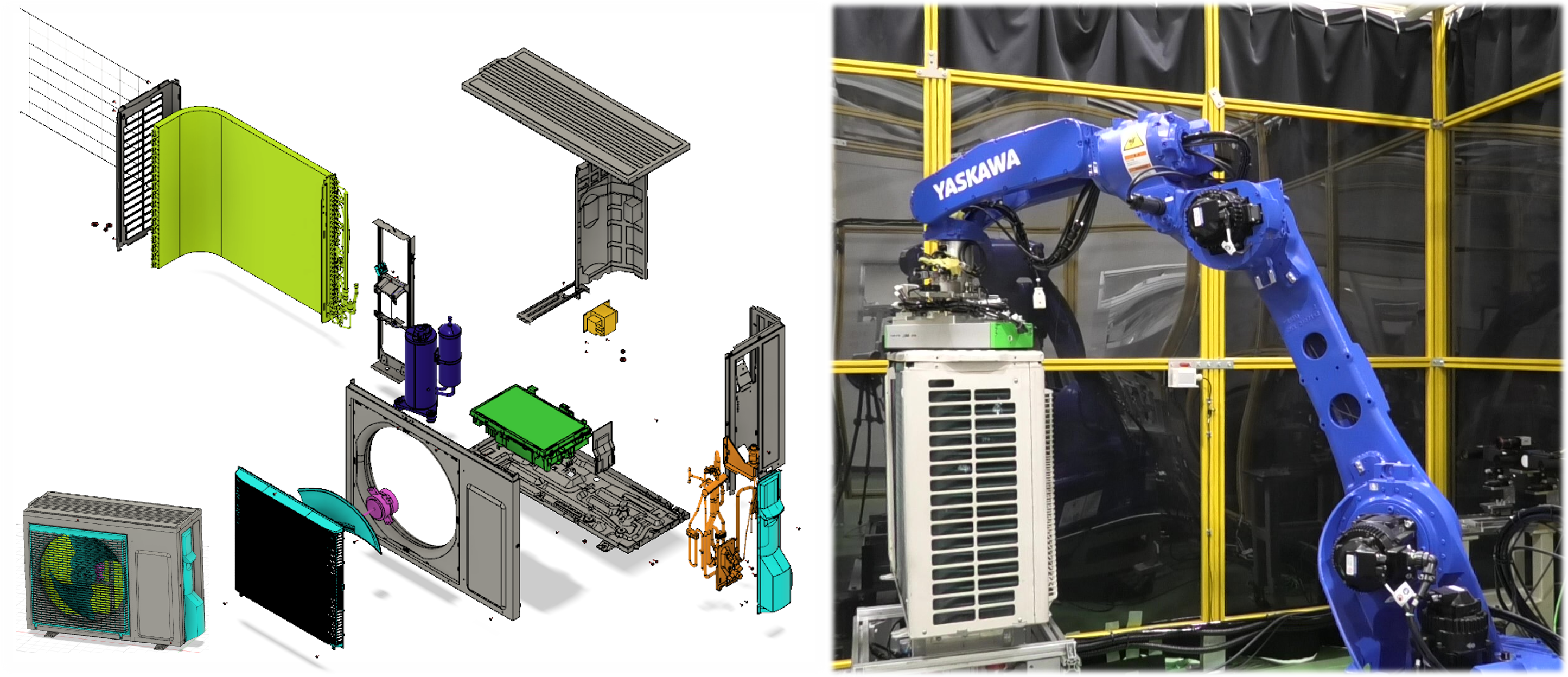
我々は、ロボットによる家電分解作業の教示レス化のため、製品の設計情報である3D CAD モデルから分解順序、タスク、動作を生成する手法の構築を目指している。部品点数の多い家電等の順序、タスク、動作の計画問題は、効率的に正しい解を発見することが難しい問題であるため、進化計算に基づく多数目的最適化アルゴリズムを導入することでこの問題の解決を図っている。これまでにシミュレーション実験において、提案手法を用いることで、ロボットによる作業を安定的に実現可能で、他の望ましい条件を満たす順序を再現よく生成可能であることが示唆されている。現在、実機システムの構築と多様な家電製品に対する生成結果の適用可能性の検証を進めている。
ビジョン
”いのちを「はぐくむ」”ためには、持続可能な社会の実現が喫緊の課題である。特に本研究の成果である知能ロボットによる分解技術を基に、廃棄物を最小限に抑えて資源を有効活用する再製造技術を実現できれば、持続可能な生産と消費の枠組みの構築へと至り、個々の企業や消費者に対する、”つくる責任つかう責任”を果たすことに繋がる。本研究成果は、循環型製造だけでなく、廃棄物処理、産業ロボット、サービスロボット分野における、分解技術を用いた新しいアプリケーション・事業の創発に寄与する。
その他
本研究を推進しているNEDO事業「高度循環型システム構築に向けた廃電気・電子機器処理プロセス基盤技術開発」では、産学官連携での取り組みとして、経済活動と環境負荷低減を両立した循環経済関連産業の創出・成長促進を目指している。本プロジェクトの中で、我々はパナソニックホールディングス株式会社マニュファクチュアリングイノベーション本部と共同研究として、本研究に取り組んでいる。
https://www.nedo.go.jp/activities/ZZJP_100242.html
担当研究者
助教 清川 拓哉、教授 原田 研介(基礎工学研究科)
キーワード
循環型モノづくり/リマニュファクチュアリング/作業知能/ロボット/分解
応用分野
循環型製造、廃棄物処分技術、産業ロボット、サービスロボット
連絡先
基礎工学研究科 清川 拓哉 kiyokawa.takuya.es@osaka-u.ac.jp