研究 (Research)
最終更新日:
AIを有するロボットマニピュレータと研究自動化 (AI-driven robotics manipulators for lab automation)
准教授 万 偉偉 (基礎工学研究科 システム創成専攻) WAN Weiwei (Graduate School of Engineering Science)
研究の概要
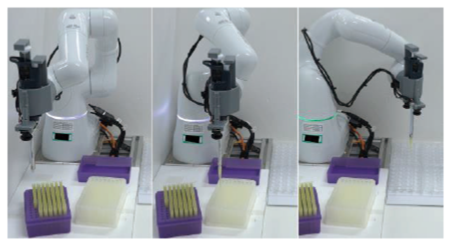
本研究では、バイオケミカル分野での液体分注を自律的に行うため、6自由度の協働ロボットを用いたシステムを開発した。本システムは主に2つのコンポーネントで構成されている:(1)手動ピペットを確実に保持し操作するための専用エンドエフェクタ、および(2)ラックの位置を認識し、位置の誤差を補正するためのカメラである。カメラはエンドエフェクタに取り付けられている。この2つの主要なコンポーネントにより、ロボットは自律的にピペットを操作し、複数の種類の液体を扱うためにピペットチップを交換することが可能となる。実験検証による、低頻度で高繰り返しの液体分注作業において高精度かつ柔軟的に作業できることが分かった。本システムは、理化学研究所の植物表現型解析システム(RIPPS)の隣に導入された。システムの導入により、理化学研究所の研究者たちは手作業の労力を大幅に削減し、研究の正確性を維持することができた。さらに、導入したシステムの活用により、新しい科学的な発見が得られた。
研究の背景と結果
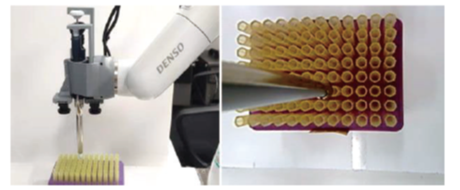
液体の取り扱いは多くの実験室で一般的に行われる作業であり、細心の注意と耐力が求められている。ここまで、液体取り扱いの問題を解決するために自動液体処理装置を開発されている。従来の自動液体処理装置は多くのスペースを必要とし、少量かつ多様な液体を扱うのには適用することは難しいである。この問題を解決するために、本研究では、協働ロボットと AI 手法を活用した柔軟な液体分注システムを開発した。開発されたシステムは主に2つのコンポーネントで構成されている:(1)手動ピペットを確実に保持し操作するための専用エンドエフェクタ、および(2)ラックの位置を認識し、位置の誤差を補正するためのカメラである。カメラはエンドエフェクタに取り付けられている。この2つの主要なコンポーネントにより、ロボットは自律的にピペットを操作し、複数の種類の液体を扱うためにピペットチップを交換することが可能となる。AI 手法では、Vision Transformer を用いて誤差を検出し、ピペットシャフトが液体吸引チップに正確に挿入できるようにした。
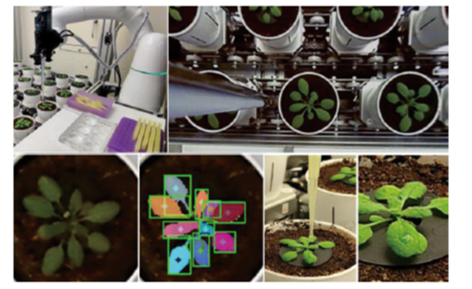
また、ロボットのエンドエフェクタに取り付けたカメラで撮影した画像を利用し、環境内の物体を認識とセグメンテーションするニューラルネットワークも開発した。この認識とセグメンテーションにより、特定の物体を正確にターゲティングすることが可能になった。本研究で開発したシステムは、理化学研究所の植物表現型解析システム(RIPPS)の隣に設置された。植物研究においては、ロボットが各葉を識別してセグメンテーションし、茎や最大の葉、指定された位置など植物の異なる部分に液体を滴下することが可能になった。さらに、ユーザーはロボットの前にチップラックや様々な液体が入ったウェルプレートを自由に置くことができ、ロボットはラックを認識し、チップ交換や人間の指示に従った液体の取り扱いを順次行うことが可能となった。
開発したシステムは、大規模な実験室のリフォームを必要とせず、柔軟な液体処理が求められる実験に適用することが期待される。
研究の意義と将来展望
本研究で開発されたシステムは、少量かつ多種類の液体の取り扱いにおける効率と精度を著しく向上させ、実験室の作業負担を軽減し、科学実験やデータ収集を促進できた。今後の課題としては、ピペットの交換に焦点を当てる予定である。最終目標は、人間のようにピペッティングを行うことであり、標準的なハンドを備えたロボットが、さまざまな液体の取り扱いに応じて異なるピペットを持ち替えることを目指している。
担当研究者
准教授 万 偉偉 (基礎工学研究科 システム創成専攻)
キーワード
自動実験ロボット/AI
応用分野
医療・創薬
参考URL
https://scienceportal.jst.go.jp/newsflash/20240125_n01/
https://researchmap.jp/weiweiwan